Solving sparse systems
There are many methods available for solving sparse systems. We compare some of them here.

Mathematica has the following methods available (https://reference.wolfram.com/language/ref/LinearSolve.html#DetailsAndOptions)
- direct: banded, cholesky, multifrontal (direct sparse LU)
- iterative: Krylov
Matlab has the following methods:
- direct: https://www.mathworks.com/help/matlab/ref/mldivide.html#bt42omx_head
- iterative: https://www.mathworks.com/help/matlab/math/systems-of-linear-equations.html#brzoiix, including bicgstab, gmres
Eigen has the following methods: (https://eigen.tuxfamily.org/dox-devel/group__TopicSparseSystems.html)
- direct: sparse LU
- iterative: bicgstab, cg
Solving a simple sparse system $A x = b$ for steady space of heat equation in 1d with $n$ nodes, results in a matrix shown in Figure 1.
The following timings of solvers are given in seconds:
| $n = 10^6$ | Matlab | Mathematica | Eigen |
|---|---|---|---|
| Banded | 0.16 | 0.28 | 0.04 |
| SparseLU | / | 1.73 | 0.82 |
| BICGStab / Krylov | 0.33 | 0.39 | 0.53 |
Incomplete LU preconditioner was used for BICGStab. Without the preconditioner BICGStab does not converge.
Parallel execution
BICGStab can be run in parallel, as explain in the general parallelism: https://eigen.tuxfamily.org/dox/TopicMultiThreading.html, and specifically
"When using sparse matrices, best performance is achied for a row-major sparse matrix format.
Moreover, in this case multi-threading can be exploited if the user code is compiled with OpenMP enabled".
Eigen uses number of threads specified my OopenMP, unless Eigen::setNbThreads(n); was called.
Minimal working example:

#include <iostream>
#include <vector>
#include "Eigen/Sparse"
#include "Eigen/IterativeLinearSolvers"
using namespace std;
using namespace Eigen;
int main(int argc, char* argv[]) {
assert(argc == 2 && "Second argument is size of the system.");
stringstream ss(argv[1]);
int n;
ss >> n;
cout << "n = " << n << endl;
// Fill the matrix
VectorXd b = VectorXd::Ones(n) / n / n;
b(0) = b(n-1) = 1;
SparseMatrix<double, RowMajor> A(n, n);
A.reserve(vector<int>(n, 3)); // 3 per row
for (int i = 0; i < n-1; ++i) {
A.insert(i, i) = -2;
A.insert(i, i+1) = 1;
A.insert(i+1, i) = 1;
}
A.coeffRef(0, 0) = 1;
A.coeffRef(0, 1) = 0;
A.coeffRef(n-1, n-2) = 0;
A.coeffRef(n-1, n-1) = 1;
// Solve the system
BiCGSTAB<SparseMatrix<double, RowMajor>, IncompleteLUT<double>> solver;
solver.setTolerance(1e-10);
solver.setMaxIterations(1000);
solver.compute(A);
VectorXd x = solver.solve(b);
cout << "#iterations: " << solver.iterations() << endl;
cout << "estimated error: " << solver.error() << endl;
cout << "sol: " << x.head(6).transpose() << endl;
return 0;
}was compiled with g++ -o parallel_solve -O3 -fopenmp solver_test_parallel.cpp.
Figure 2 was produced when the program above was run as ./parallel_solve 10000000.
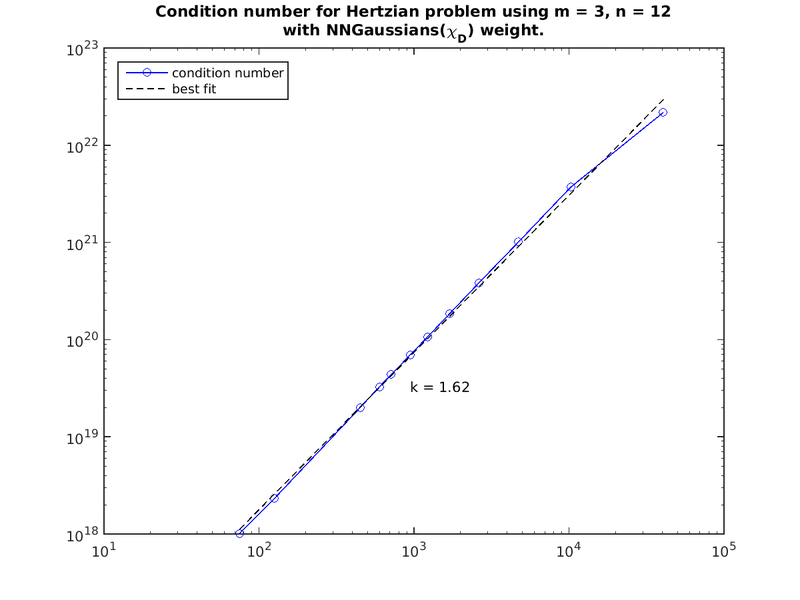
Herzian contact
The matrix of the Hertzian contact problem is shown below:


The condition number iz arther large and grows superlinearly with size in the example below.